中国科学院自动化研究所和中国科学院生物遗传与发育研究所联合研发了面向现代温室的育种/制种流程加速的全自动化方法与机器人系统。
8月11日,相关研究论文以Engineering tomato floral morphology facilitates robotization of cross-pollination and speed breeding为题,在线发表于《细胞》(Cell)。该项研究是人工智能、机器人技术和现代育种业的深度交叉融合,开辟了“BT(Biological Technology)筑基+AI赋能+机器人(Robot)劳作”的智能育种(BAR)模式,打破了传统杂交育种和制种瓶颈,大幅降低育种成本、缩短育种周期、提高育种效率。研究成果标志着我国率先完成智能机器人育种闭环技术体系构建,在生物育种范式革新和催生新质生产力方面展现了“AI for Science”的应用前景。
数千年来,人类文明从40多万种植物中驯化出适用于温室育种、制种、生产的40多种农作物,这40多种农作物是人类餐桌的主要食物来源。一定程度上,制作、养育、生产好这些农作物为人类的粮食安全提供了基本保障。目前,在温室作物育种、制种的“种-管-育-收”四个阶段中,无论异花授粉作物(如瓜类、十字花科类作物等),还是自花授粉作物(如茄科、禾木科作物),其育种阶段仍然大量依靠人工避开包裹雌蕊的雄蕊将花粉涂抹到雌蕊的柱头上。人工杂交育种过程处理要求非常精细,耗时耗力,是现代温室作物育种/制种流程全自动化的主要瓶颈。
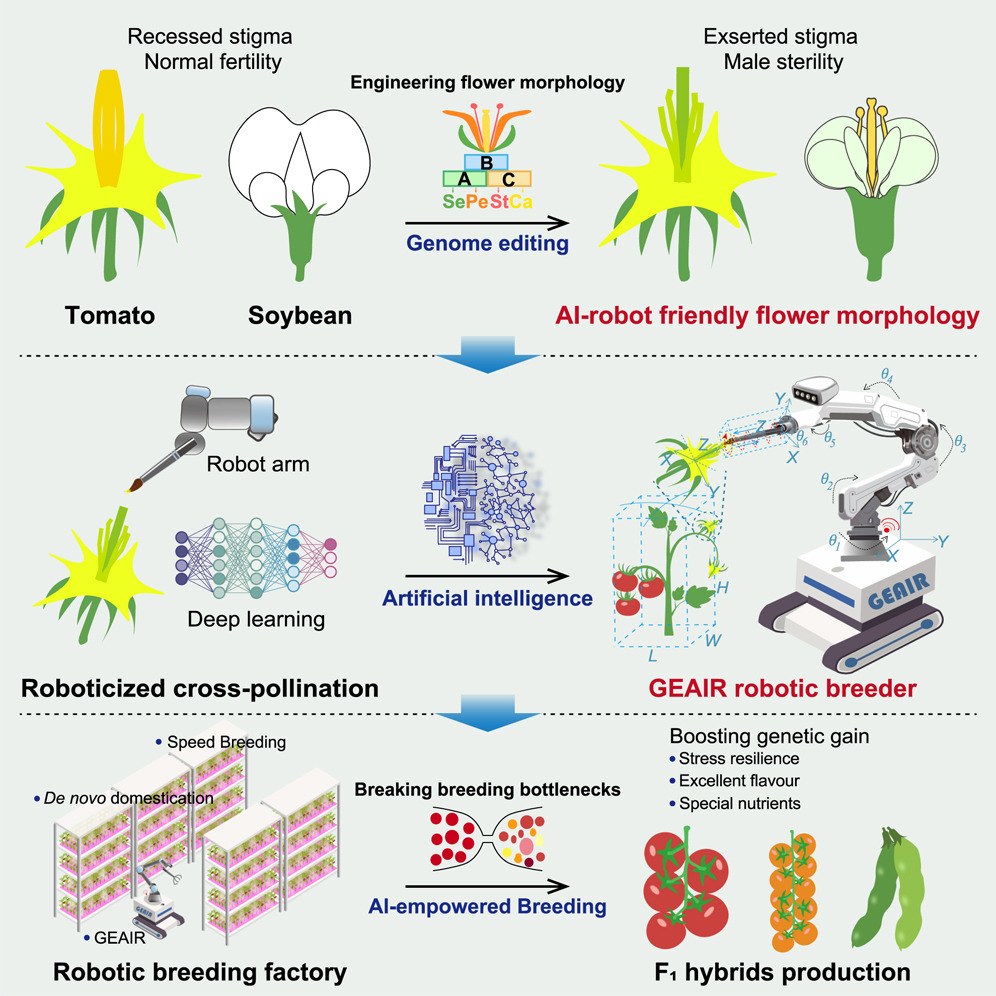
图1. 智能育种机器人用于温室番茄、大豆育种/制种流程自动化及加速
本研究针对异花授粉作物建立了传感受限条件下极端微小操作目标精确感知、微弱育种目标柔顺操作与温室轨道精确停驻等方法;针对自花授粉作物,更进一步建立了基于分子育种技术的柱头外露雄性不育系。研究组基于上述人工智能机器人技术和分子育种技术,联合开发了面向现代温室作物育种/制种流程自动化的智能育种机器人,并在北京首农翠湖工场北1区育种示范基地进行了部署(图2),实现了自动化杂交育种。
育种机器人柱头识别准确率可达85.1%,每授粉一个花朵仅耗时13秒,单次巡航授粉实现了77.6% ± 9.4%的成功率,且可以全天候不间断进行反复巡航自动杂交授粉以确保每朵花成功授粉坐果。在坐果率相当的情况下,针对异花授粉作物,机器人授粉效率和人工授粉接近;对于自花授粉作物,机器人授粉效率比人工授粉效率明显提升,展示了温室中更快培育气候适应性作物来提高效率和降低成本的潜力。
上述研究成果为精准农业提供了可推广的技术模板,其“生物设计-机器适配"的双向优化思路,为应对气候变化下的粮食安全挑战提供了智能化解决方案。未来还可拓展至表型监测、智能采收等农业全链条自动化场景。目前,育种机器人零部件已经实现全部国产化,应用前景广阔。
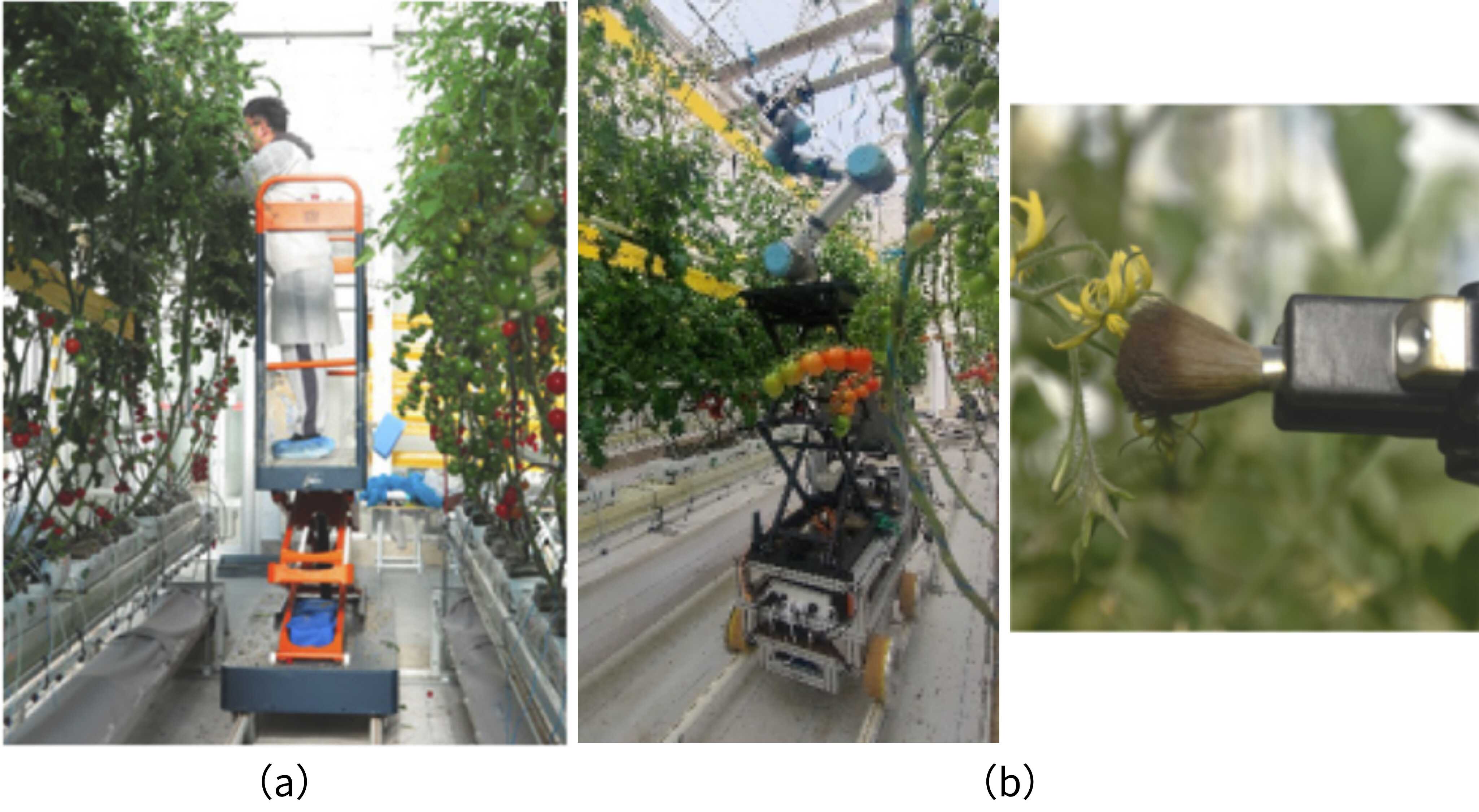
图2. 智能育种机器人在北京翠湖工场北1区育种示范基地工作情况 (a)人工杂交育种(b)机器人自动杂交育种
中国科学院自动化研究所杨明浩副研究员是本论文共同第一作者,同时也是论文人工智能和机器人技术部分负责人;中国科学院自动化研究所2021级硕士研究生孙杨昌、2023级硕士研究生吕鸿昌、2025级硕士研究生王金阳、实习生肖俊、齐靖达、刘安琪、肖志纲分别参与了论文机器人视觉感知、机器人灵巧操作、机器人系统搭建及机器人温室自主漫游等工作。中国科学院生物遗传与发育研究所许操研究员为论文通讯作者;中国科学院生物遗传与发育研究所博士生谢跃、张廷浩为论文共同第一作者,负责分子育种设计方面的工作。中国科学院自动化研究所韩华研究员,清华大学陶建华教授亦对本文做了重要贡献。另外,首农翠湖工场李新旭、李树山等对该项研究提供了重要支撑和帮助。该项研究得到了中国科学院自动化研究所怀柔脑认知功能图谱与类脑智能交叉研究平台项目、国家自然科学基金京津冀基础研究合作专项、中国科学院战略先导B类专项、广西重点研发计划等项目的资助。
相关论文信息:
Yue Xie* ,Tinghao Zhang*,Minghao Yang*,Hongchang Lyu,Yupan Zou,Yangchang Sun,Jun Xiao,Wenzhao Lian,Jianhua Tao,Hua Han,and Cao Xu#,"Engineering tomato floral morphology facilitates robotization of cross-pollination and speed breeding,Cell,2025.
Minghao Yang*#,Hongchang Lv*,Yongjia Zhao#,Yangcheng Sun,Hang Pan,Qi Sun,Jinlong Chen,Hongbo Yang. Delivery of Pollen to Forsythia Flower Pistils Autonomously and Precisely Using a Robot Arm,Computers and Electronics in Agriculture,214,2023. pp:108274-108287,2023.108274.
(标注说明:*为第一作者,#为通讯作者)
论文地址:
https://doi.org/10.1016/j.cell.2025.07.028.
http://dl.acm.org/doi/10.1016/j.compag.2023.108274.